












新闻中心
News Center 更新时间:2025-03-17
更新时间:2025-03-17 点击次数:
点击次数: 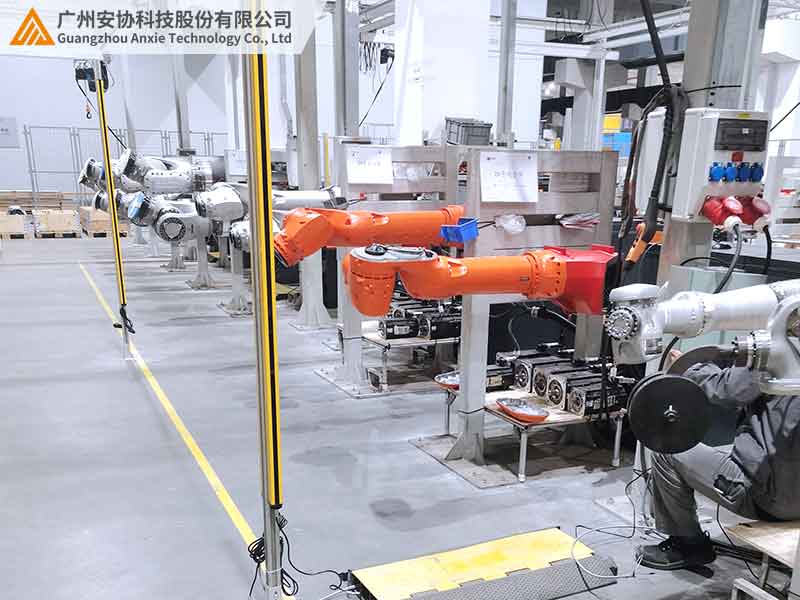
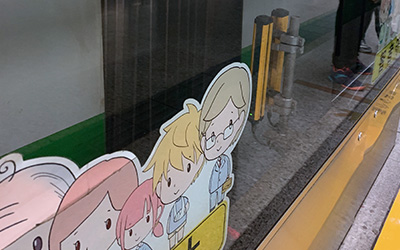
机器人光幕防护方案
一、核心防护原理与功能
在机器人协作场景中,安全光幕作为核心防护设备,需依据机器人动态工作特性与环境要求,设计综合性方案。以下为具体防护方案的关键要点:
1.非接触式监测
借助红外光束或激光构建隐形屏障,对机器人协作区域予以覆盖。一旦人员或物体进入该区域,光幕会即刻触发信号,促使机器人紧急停机或切换至低速模式,从而规避碰撞风险。
2.动态区域设置
此光幕支持多级防护区域划分(例如预警区、危险区),能够依据任务需求灵活调整保护范围与灵敏度。举例而言,在装配线里可设置临时通行区域,以减少误触发情况。
3.分类识别功能
部分高端光幕集成了AI算法,能够区分人员、物料以及机器人本体,减少因非人员干扰而导致的误停机现象,进而提升生产效率。
二、典型应用场景方案
1.人机协作装配线
在机器人工作区域的三面安装光幕(靠墙一侧无需安装),形成U型防护区,覆盖机器人活动半径外延500mm的范围。
搭配声光报警装置,当人员进入时,触发警示灯和蜂鸣器,同时向PLC发送停机指令。
2.上下料工作站
采用多套光幕组合,形成立体防护网,覆盖机器人抓取路径和传送带区域。
具备复位功能:人员离开后,可通过按钮重启机器人,避免生产中断。
3.高危作业环境(如冲压、焊接)
选用光轴间距为10mm的高分辨率光幕,确保达到手指级防护精度;对射距离需覆盖设备的最大行程,如3米以上。
配备冗余控制系统,双CPU实时校验信号,符合ISO 13849 - 1安全等级PLd要求。
三、技术选型与集成要点
1.参数匹配
光轴间距:依据防护等级进行选择(10mm用于防手指穿透/40mm用于防手臂侵入)。
响应时间:需小于等于20ms,以确保机器人急停距离符合ISO/TS 15066标准。
2.系统集成
通过安全继电器或PROFIsafe协议与机器人控制器直接连接,实现毫秒级响应。
结合力控传感器或视觉系统,形成多层级防护。例如,当安全光幕触发后,机器人自动切换至5cm/s的低速模式。
3.抗干扰设计
选用金属外壳型号的光幕,以抵御电磁干扰,避免因车间设备(如变频器)而导致误动作。
定期校准光束对齐度,防止因粉尘遮挡而引发的信号衰减。
四、行业实践案例
1.汽车焊接工作站(安协HP系列安全光栅) 通过光幕与围栏联动,在1.2米高度形成防护网,并配合区域闯入门禁系统,实现人车分流管理。
2.电子元件装配线(安协HNG系列安全光幕) 多光幕组网覆盖六轴机器人的工作范围,支持Modbus - TCP协议与MES系统集成,实时记录安全事件。
通过上述方案,安全光幕能够有效平衡机器人协作场景下的安全性与生产效率。在实际部署时,建议结合专业安全评估(如风险评估矩阵法),进行定制化的防护层级设计。更多技术细节可参考相关案例。

 当前位置:
当前位置: